Ny robotassistance til Pressalit
 Af Christine Højer Rytter
Af Christine Højer Rytter
En af verdens største producenter af toiletsæder, Pressalit, får hjælp fra robotter i deres nye system til automatisk pakning af toiletsæder. Det skriver Egatec, der leverer robotterne til Pressalit, i en pressemeddelelse.
Der er tale om et såkaldt bin-picking-system, som meget forsimplet kan forklares sådan, at det er en robot, der ved hjælp af sensorer og visionsteknologi kan genkende varen og samle den op.
Flere brancher har store udfordringer med processer, hvor medarbejdere skal løse tunge eller gentagne arbejdsfunktioner, som ellers godt kunne automatiseres effektivt og rentabelt.
Robotter efterligner mennesker
Udfordringen ved bin-picking-teknologien er, at de objekter, der skal flyttes, ligger i en ukendt eller tilfældig position.
For Egatec betyder det, at de skulle finde en simpel løsning, hvor robotten skal efterligne de menneskelige bevægelser.
Den tidligere manuelle proces blev varetaget af medarbejdere, der sørgede for, at poser med beslag og hængsler blev pakket sammen med toiletsæderne.
Den rette vinkel og præcis placering
Typisk ligger disse poser usystematisk i kasser. Robotternes visionsystem er derfor afgørende for at det kan lade sig gøre.
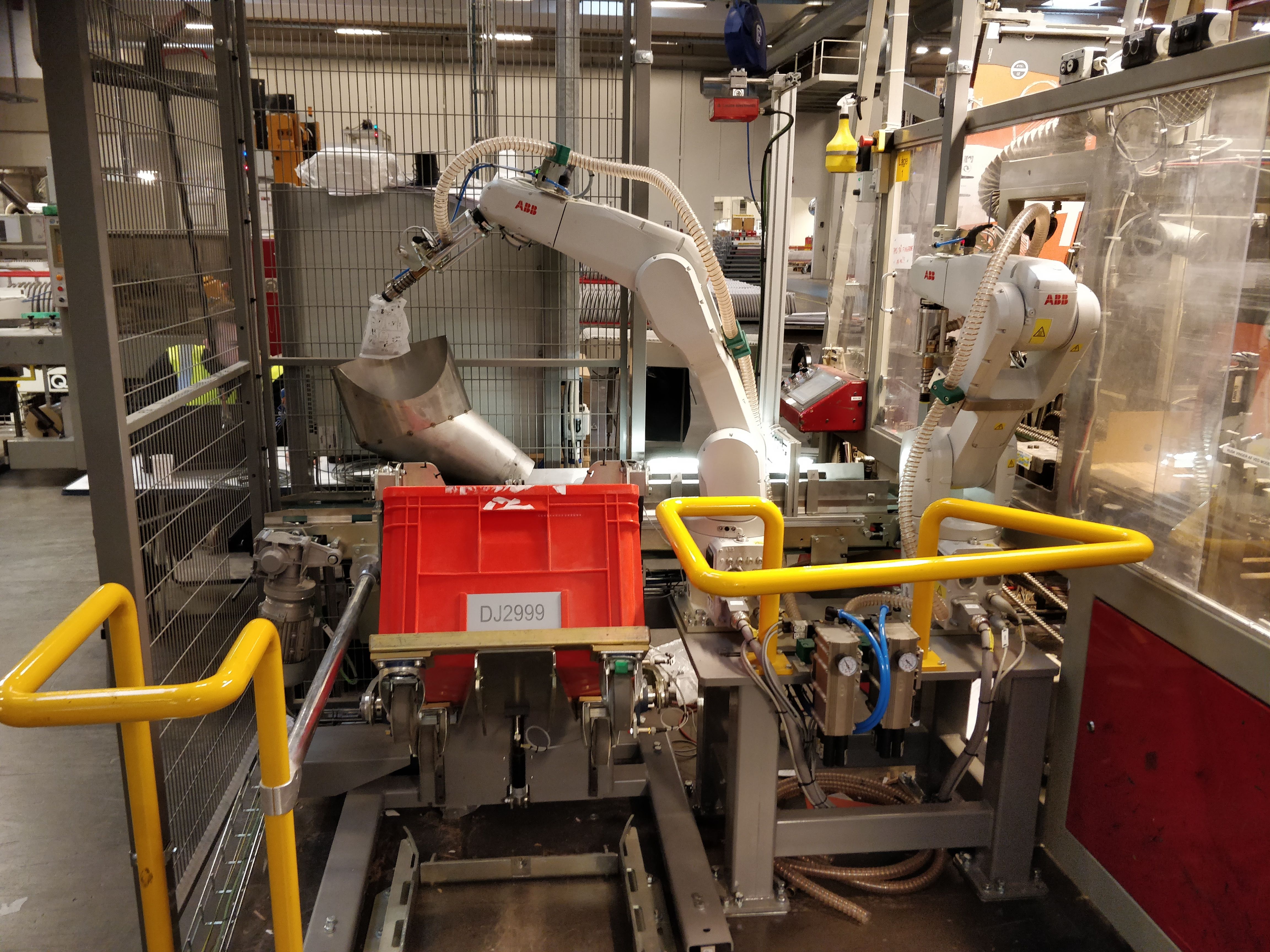
- Robotten skal tage højde for, hvor og hvordan posen er placeret på transportbåndet for efterfølgende at tage den op i den rette vinkel og placere i kassen med toiletsædet. Her er det meget vigtigt, at placeringen sker præcist i midten af sædet, da der ellers ville kunne opstå skader på emnet og samtidig ville kassen ikke kunne lukkes, siger Lasse Johansen, der er softwareingeniør hos Egatec og fortsætter:
- For mennesker er det intet problem at tage varer op fra en kasse eller et transportbånd, men hvis en robot skal gøre det samme, skal der ”øjne” på. Derfor er visionsystemet en vigtig del af processen.
- Spændende forløb
Ved hjælp af to robotter bliver de færdige toiletsæder pakket til forsendelse til kunder, som Pressalit distribuerer verden over. Robotterne kan genkende position, form og orientering.
- Baseret på dette, har vi været i stand til at give input til robotten om, hvor posen ligger og hvordan den vender. Kompleksiteten af maskinen har gjort projektet til et spændende forløb, hvor vi har fremstillet en maskine der både er hurtig, brugervenlig og samtidig avanceret, afslutter Lasse Johansen.




